Integrating with TestNG¶
Compatible with SpiraTest, SpiraTeam, SpiraPlan
Installing the TestNG Listener¶
This section outlines how to install the Spira Listener for TestNG onto a workstation so that you can then run automated TestNG unit tests against a Java application and have the results be recorded as test runs inside Spira. It assumes that you already have a working installation of Spira v3.0 or later. If you have an earlier version of Spira you will need to upgrade to at least v3.0 before trying to use this listener. You will also need to have at least version 1.0 of TestNG running under JDK 1.5 or later, since earlier versions do not have support for annotations and custom listeners. If you are using an earlier version, please visit testng.org to obtain the latest version.
To obtain the latest version of the TestNG listener, you simply need to log-in as a project-level administrator to Spira, go to the Administration home page and download the Spira TestNG Listener compressed archive (.zip) from the section that lists downloads and add-ons. This process is described in the Spira Administration Guide in more detail.
The TestNG listener is provided as a compressed zipfile that includes both the binaries (packaged as a JAR-file) and the source code (stored in a folder structure that mirrors the Java classpath). The JAR-file binary was compiled for use on a Windows x86 platform, other platforms (e.g. Linux) will require you to compile the Java source files into the appropriate Java classfiles before using the extension. The rest of this section will assume that you are using the pre-compiled JAR-file.
Once you have downloaded the Zip archive, you need to uncompress it into a folder of your choice on your local system. Assuming that you uncompressed it to the C:\Program Files\SpiraTestListener folder, you should have the following folder structure created:
C:\Program Files\SpiraTestListener
C:\Program Files\SpiraTestListener\com
C:\Program Files\SpiraTestListener\com\inflectra
C:\Program Files\SpiraTestListener\com\inflectra\spiratest
C:\Program Files\SpiraTestListener\com\inflectra\spiratest\addons
C:\Program Files\SpiraTestListener\com\inflectra\spiratest\addons\testnglistener
C:\Program Files\SpiraTestListener\Extension\com\inflectra\spiratest\addons\testnglistener\samples
The JAR-file is located in the root folder, the source-code for the extension can be found in the "testnglistener" subfolder, and the sample test fixture can be found in the "samples" subfolder.
Now to use the listener within your test cases, you need to first make sure that the JAR-file is added to the Java classpath. The method for doing this is dependent on the platform you're using, so please refer to FAQ on www.testngorg for details on the appropriate method for your platform. As an example, on a Windows platform, the JAR-file would be added to the classpath by typing the following: set CLASSPATH=%CLASSPATH%; C:\\Program Files\\SpiraTestListener\\TestNGListener.jar
Once you have completed this step, you are now ready to begin using your TestNG test fixtures with Spira.
Using TestNG with Spira¶
The typical code structure for a TestNG test fixture coded in Java is as follows:
package com.inflectra.spiratest.addons.testnglistener.samples;
import org.testng.annotations.*;
import static org.testng.AssertJUnit.*;
import java.util.*;
/**
* Some simple tests using the ability to return results back to Spira
*
* @author Inflectra Corporation
* @version 2.3.0
*
*/
@Test(groups={"unittest"})
public class SimpleTest
{
protected int fValue1;
protected int fValue2;
/**
* Sets up the unit test
*/
@BeforeClass
public void setUp()
{
fValue1= 2;
fValue2= 3;
}
/**
* Tests the addition of the two values
*/
@Test(groups={"unittest"})
public void testAdd()
{
double result = fValue1 + fValue2;
// forced failure result == 5
assertTrue (result == 6);
}
/**
* Tests division by zero
*/
@Test(groups={"unittest"})
public void testDivideByZero()
{
int zero = 0;
int result = 8 / zero;
result++; // avoid warning for not using result
}
/**
* Tests two equal values
*/
@Test(groups={"unittest"})
public void testEquals()
{
assertEquals(12, 12);
assertEquals(12L, 12L);
assertEquals(new Long(12), new Long(12));
assertEquals("Size", 12, 13);
assertEquals("Capacity", 12.0, 11.99, 0.0);
}
/**
* Tests success
*/
@Test(groups={"unittest"})
public void testSuccess()
{
//Successful test
assertEquals(12, 12);
}
}
The Java class is marked as a TestNG test fixture by applying the @Test attribute to the class definition, and the @Test attribute to each of the test assertion methods individually -- highlighted in yellow above. In addition, special setup methods are marked with annotations such as @BeforeClass. When you open up the class in a TestNG runner or execute from the command line it loads all the test classes and executes all the methods marked with @Test in turn.
Each of the Assert statements is used to test the state of the application after executing some sample code that calls the functionality being tested. If the condition in the assertion is true, then execution of the test continues, if it is false, then a failure is logged and TestNG moves on to the next test method.
So, to use Spira with TestNG, each of the test cases written for execution by TestNG needs to have a corresponding test case in Spira. These can be either existing test cases that have manual test steps or they can be new test cases designed specifically for automated testing and therefore have no defined test steps. In either case, the changes that need to be made to the TestNG test fixture for Spira to record the TestNG test run are illustrated below:
package com.inflectra.spiratest.addons.testnglistener.samples;
import org.testng.annotations.*;
import static org.testng.AssertJUnit.*;
import com.inflectra.spiratest.addons.testnglistener.*;
import java.util.*;
/**
* Some simple tests using the ability to return results back to Spira
*
* @author Inflectra Corporation
* @version 2.3.0
*
*/
@SpiraTestConfiguration(
url="http://localhost/Spira",
login="fredbloggs",
apiKey="{00000000-0000-0000-0000-000000000000}",
projectId=1,
releaseId=1,
testSetId=-1
)
@Test(groups={"unittest"})
public class SimpleTest
{
protected int fValue1;
protected int fValue2;
/**
* Sets up the unit test
*/
@BeforeClass
public void setUp()
{
fValue1= 2;
fValue2= 3;
}
/**
* Tests the addition of the two values
*/
@Test(groups={"unittest"})
@SpiraTestCase(testCaseId=5)
public void testAdd()
{
double result = fValue1 + fValue2;
// forced failure result == 5
assertTrue (result == 6);
}
/**
* Tests division by zero
*/
@Test(groups={"unittest"})
@SpiraTestCase(testCaseId=5)
public void testDivideByZero()
{
int zero = 0;
int result = 8 / zero;
result++; // avoid warning for not using result
}
/**
* Tests two equal values
*/
@Test(groups={"unittest"})
@SpiraTestCase(testCaseId=6)
public void testEquals()
{
assertEquals(12, 12);
assertEquals(12L, 12L);
assertEquals(new Long(12), new Long(12));
assertEquals("Size", 12, 13);
assertEquals("Capacity", 12.0, 11.99, 0.0);
}
/**
* Tests success
*/
@Test(groups={"unittest"})
@SpiraTestCase(testCaseId=6)
public void testSuccess()
{
//Successful test
assertEquals(12, 12);
}
}
The overall class is marked with a new @SpiraTestConfiguration attribute that contains the following pieces of information needed to access the Spira test repository:
- URL - The URL to the instance of Spira being accessed. This needs to start with http:// or https://
- Login - A valid username for the instance of Spira.
- apiKey - A valid API Key / RSS Token for the instance of Spira (for the user specified in Login).
- Project Id - The ID of the project (this can be found on the project homepage in the "Project Overview" section)
- Release Id (Optional) - The ID of the release to associate the test run with. This can be found on the releases list page (click on the Planning > Releases tab). If you don't want to specify a release, just use the value -1.
- Test Set Id (Optional) - The ID of the test set to associate the test run with. This can be found on the test set list page (click on the Testing > Test Sets tab). If you don't want to specify a test set, just use the value -1. If you choose a test set that is associated with a release, then you don't need to explicitly set a release id (i.e. just use -1). However if you do set a release value, it will override the value associated with the test set.
In addition, each of the individual test methods needs to be mapped to a specific test case within Spira. This is done by adding a @SpiraTestCase attribute to the test method together with the ID of the corresponding test case in Spira. The Test Case ID can be found on the test cases list page (click the "Test Cases" tab).
For these attributes to be available in your test fixture, you also need to add a reference to the com.inflectra.spiratest.addons.testnglistener package. This package is bundled within the supplied JAR-file library for Windows machines, and can be compiled from the provided source .java files on other platforms.
Running the TestNG Tests from the Command-Line¶
Now all you need to do is compile your code and then launch TestNG by executing the test fixture through the command line (or through your choice of IDE, e.g. Eclipse) with the Spira listener option specified as a command argument. E.g. for our sample test, you would use the following command:
-classpath "C:\Program
Files\SpiraTestListener\TestNGListener.jar;C:\Program
Files\TestNG-5.7\testng-5.7\testng-5.7-jdk15.jar" org.testng.TestNG
-listener
com.inflectra.spiratest.addons.testnglistener.SpiraTestListener
com\inflectra\spiratest\addons\testnglistener\samples\unittests.xml
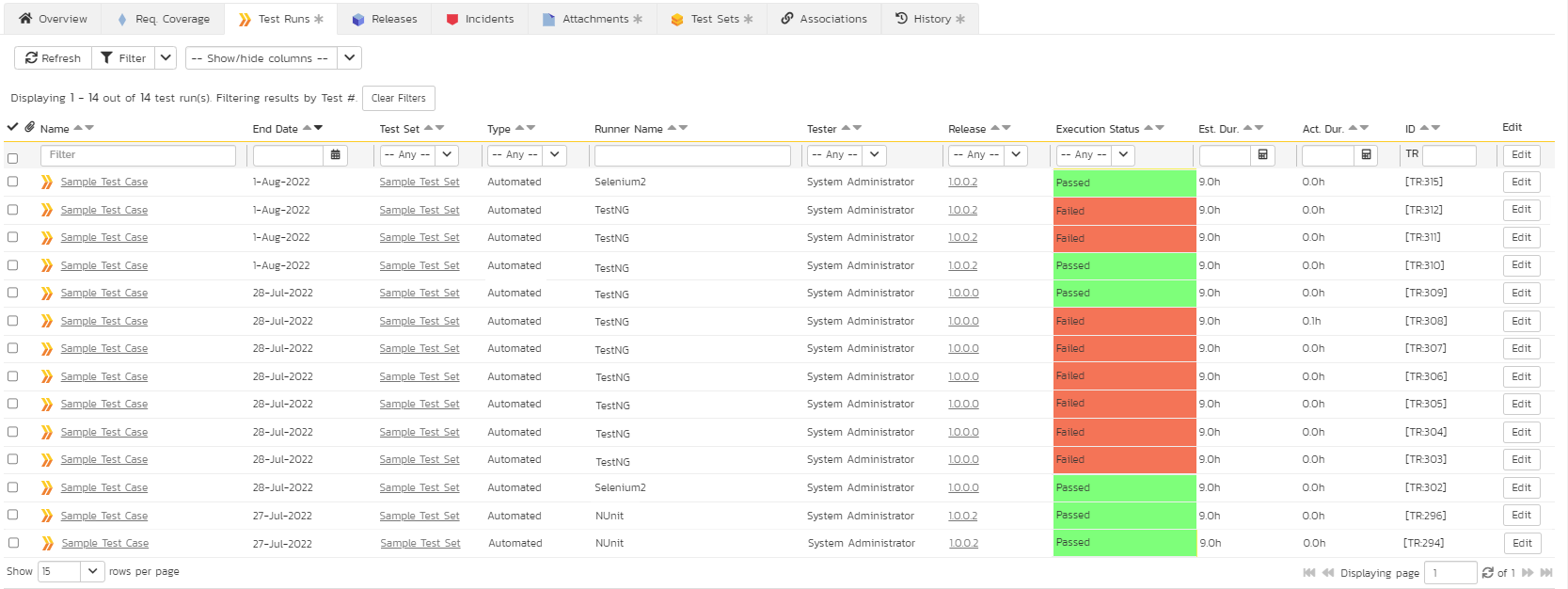
Once the test has run, you can view the test cases in Spira, you should see a TestNG automated test run displayed in the list of executed test runs:
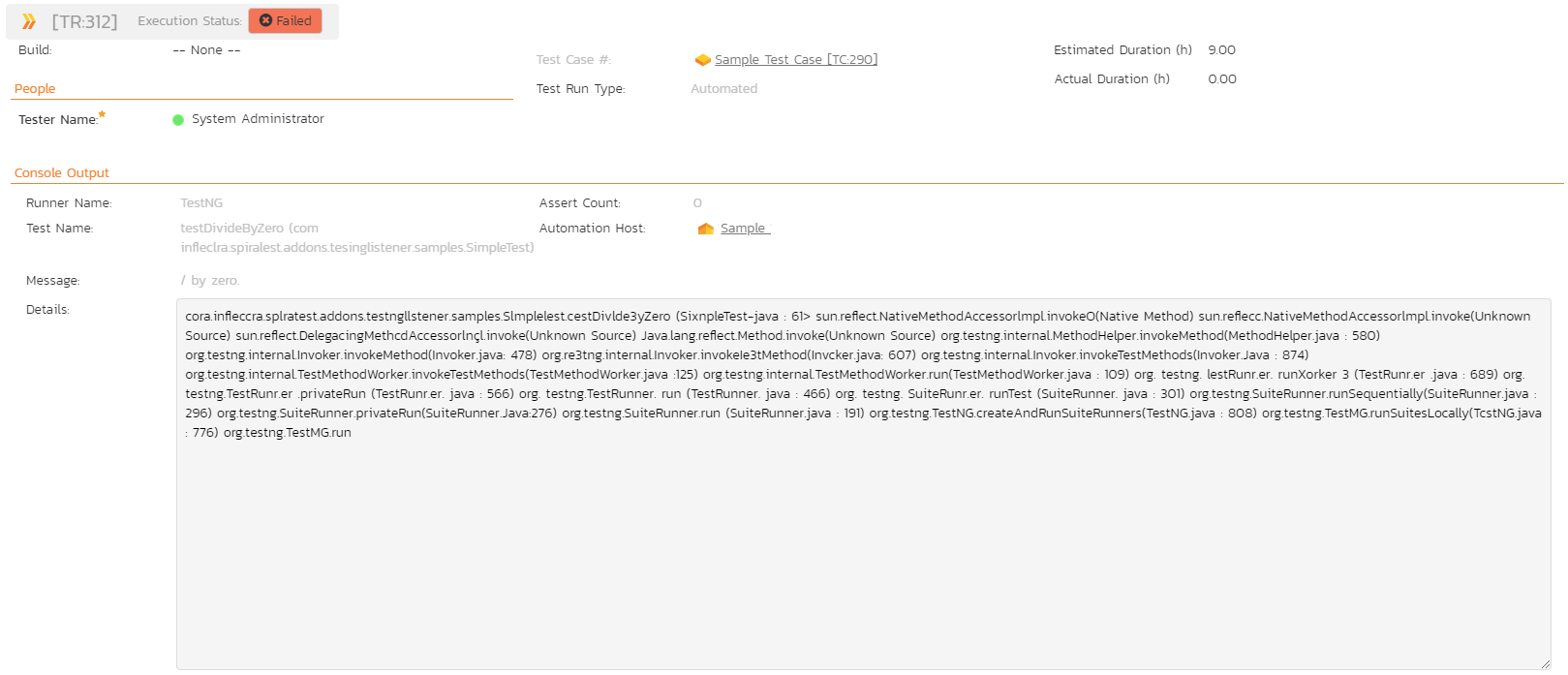
Clicking on one of the TestNG test runs will bring up a screen that provides information regarding what TestNG test method failed, what the error was, together with the associated code stack-trace:
Congratulations... You are now able to run TestNG automated tests and have the results be recorded within Spira. The sample test fixture SimpleText.java is provided with the installation.
Have Questions or Need Assistance?¶
If you are an Inflectra customer, please contact our customer support at:
- Email: support@inflectra.com
- Help Desk: https://www.inflectra.com/Support/
Otherwise, please feel free to post a question on our public forums: